




上海傅利葉智能科技股份有限公司作為通用機器人企業(yè),秉持"以人為本,服務于人"的產(chǎn)品理念,持續(xù)探索前沿技術(shù)與應用場景的深度融合,打造懂交互、有溫度的具身智能。
?
讓機器人來解讀人類的語言、表情、動作乃至情緒,并根據(jù)不同場景需求提供恰到好處的反饋,這一目標的實現(xiàn)需要多項前沿技術(shù)的深度融合與協(xié)同創(chuàng)新。
在具身智能技術(shù)研發(fā)的過程中,動作捕捉系統(tǒng)已成為機器人訓練的一大助力。傅利葉與元客視界積極合作,引入FZMotion運動捕捉實驗室,通過采集高精度的動作數(shù)據(jù),將仿真訓練與真機測試相結(jié)合,共同形成人形機器人高效訓練的完整閉環(huán)。


斯坦福大學團隊在今年5月的一項突破性成果TWIST(Teleoperated Whole-Body Imitation System)系統(tǒng),通過動作捕捉與學習控制的深度融合,穩(wěn)定高效的實現(xiàn)了遠程操控人形機器人執(zhí)行全身動作,為通用機器人智能的發(fā)展提供了重要技術(shù)路徑。該研究成果表明,高精度動作捕捉已成為具身智能從仿真到現(xiàn)實遷移的核心基礎(chǔ)設施。

元客視界FZMotion運動捕捉系統(tǒng)為機器人運動控制提供現(xiàn)實世界的數(shù)據(jù)參考基準,用于驗證仿真模型的準確性,同時可以校準優(yōu)化機器人控制算法,以確保仿真訓練的策略直接遷移到真實機器人上,減少了現(xiàn)實調(diào)試的時間,讓算法驗證更快的落地到應用場景。尤其是在Sim to Real的轉(zhuǎn)化過程中,高精度動作捕捉數(shù)據(jù)有效彌補了仿真環(huán)境與現(xiàn)實數(shù)據(jù)的差距,讓學習訓練成果得以完美復現(xiàn)到實體機器人本體上。
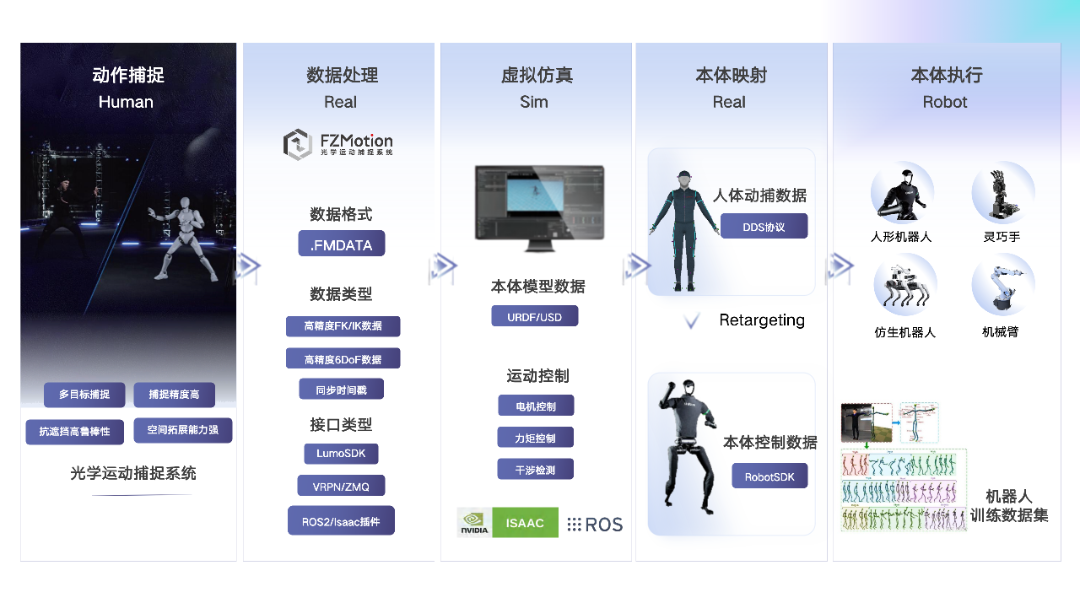
實時捕捉機器人關(guān)節(jié)角度、運動軌跡等數(shù)據(jù),將關(guān)節(jié)角度誤差控制在0.1°以內(nèi),末端執(zhí)行器精度達亞毫米級,可同時支持多目標并行追蹤,全面評估機器人的步態(tài)穩(wěn)定性、姿態(tài)控制與操作精度,從足部貼合度到關(guān)節(jié)角度,從頭部晃動到抓取姿態(tài),每一個細節(jié)都轉(zhuǎn)化為可量化的數(shù)據(jù)指標,基于多維度運動參數(shù)分析,整機性能與核心零部件評估,構(gòu)建機器人出廠檢測和性能評估指標,為運動控制算法優(yōu)化、機械結(jié)構(gòu)改進、出廠質(zhì)量評估提供高質(zhì)量數(shù)據(jù)支撐。

創(chuàng)新技術(shù)的加入正在成為提升機器人可靠性與智能化的關(guān)鍵環(huán)節(jié),行業(yè)專家曾說“人類幼崽通過跌倒學會行走,具身智能的進化邏輯與此同源,它需要真實世界的疼痛反饋來塑造智能。”
